Object Masks
We used LangSAM: Language based Segment Anything model to obtain object masks.
Credits: https://github.com/luca-medeiros/lang-segment-anything
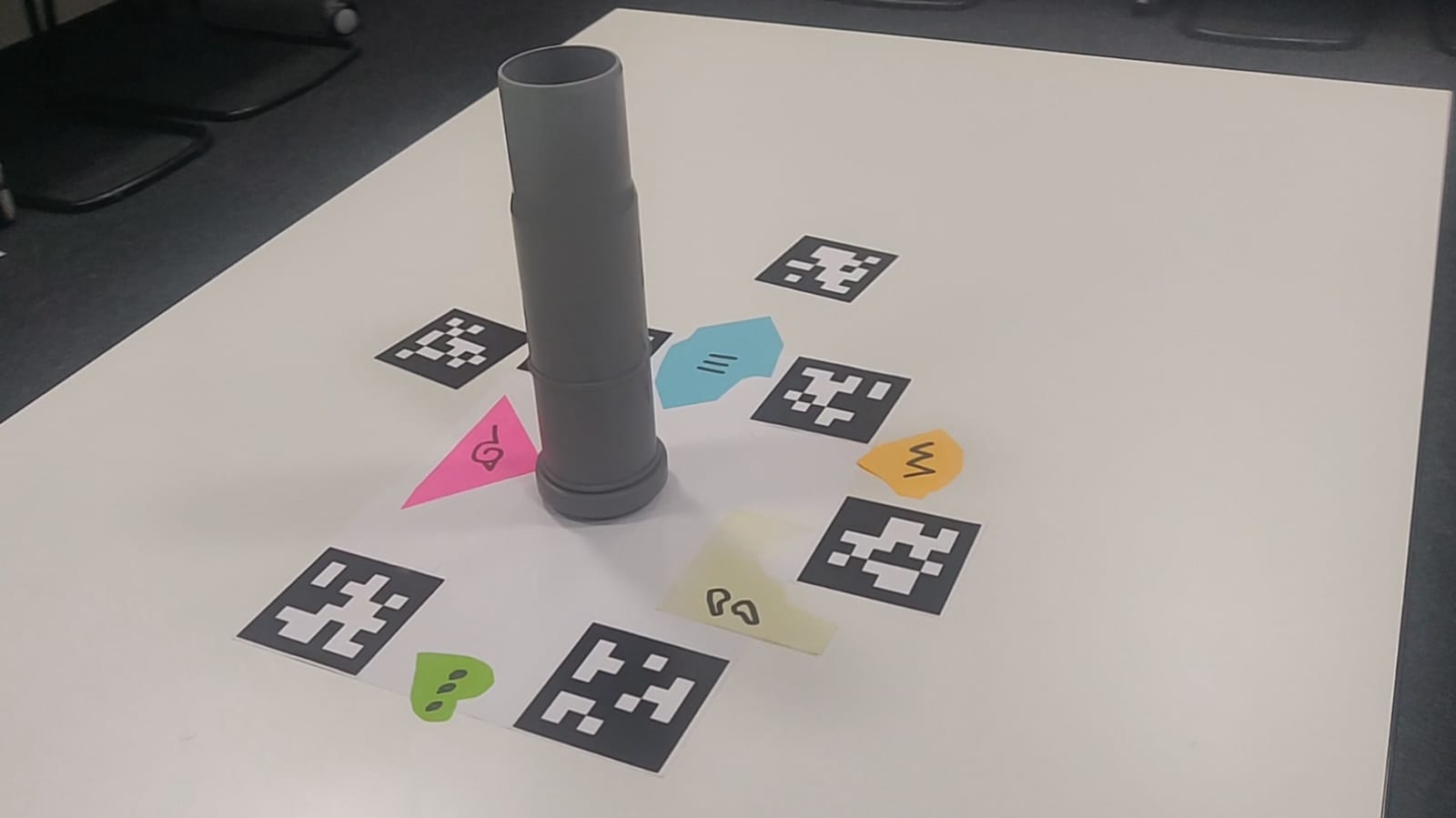
This work is done as part of my research assistant position at Computer Vision and Machine Perception Lab. The task is collect multiview images of 120 specular objects using mobile held camera in good and bad lighting conditions. Process them to obtain poses, 2D object masks and corresponding 3D bounding box.
We used LangSAM: Language based Segment Anything model to obtain object masks.
Credits: https://github.com/luca-medeiros/lang-segment-anything

To derive the 3D bounding box, a prerequisite is the availability of a 3D representation of the object. We leverage the point cloud generated through the dense reconstruction process in COLMAP. However, the resulting point cloud might exhibit considerable noise. To mitigate this, a three-step noise filtering approach is implemented:
The initial step involves the triangulation of the April tags positioned at the object's four corners, allowing for the determination of the object's center.
2) Subsequently, a cylinder is constructed with a specified radius, and points that lie outside this cylinder is excluded.
3) Finally, the 3D points are projected back onto image coordinates. We noticed the displacement of projected points onto the image masks. This displacement can be attributed to errors in the estimated camera poses. To prevent the inadvertent removal of these object points, a dilation operation is applied to the masked image and a voting-based removal mechanism is employed.
The noisy points within the point cloud are effectively filtered out, contributing to the accuracy of the subsequent 3D bounding box estimation process.
created with
Static Site Generators .